








TECHNOLOGY
&
SERVICE
技術・サービス
![]()
サイト内検索
TECHNOLOGY
&
SERVICE
技術・サービス
省力化

老朽化したコンクリート構造物を補修する際、最初に劣化部コンクリートの除去が必要になります。「吸着自走式ウォータージェットはつりロボット」は、構造物の壁面に真空吸着し、コンクリート表面を自走しながらウォータージェットによるはつり作業を行うリモコン式のロボットです。
本機は吸着自走部とはつり部を分離することで深いはつりを可能にするほか、従来のウォータージェット工法で問題となっていた騒音、水の飛散、苦渋作業(人力作業)等の周辺環境への影響や作業環境の問題を解決しました。
| 全体 | 寸法 横 1,207mm×縦 1,235mm×高 450mm 重量 約200kg 駆動 電源:AC200V/220V 600W |
|---|---|
| 吸着自走部 | 走行速度 0~5.0m/分(インバーター制御) 走行方向 上下左右 吸着部 負圧:-0.05~-0.06MPa |
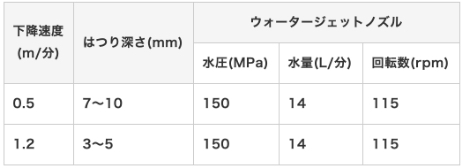
| はつり部 | 処理幅 約240mm 水圧 100~245MPa |
| はつり性能 |
3~5mmはつり時の1日(6時間)の稼動量:40~50㎡ |
![]()